Appearance
1. CNN特点
假设一批图片样本,图片尺寸都是100 × 100(单通道)。使用神经网络来进行训练,假设第一个隐藏层有2500个神经单元,则参数个数一共为 10000 × 2500 = 2500W
存在的问题:
- 参数数据量太多,需要大量的计算资源
- 图片是一个二维结构,相邻像素之间的关联较强,距离远的像素之间关联较弱,因此不必要一次性把所有像素在一起计算
CNN可以很好地解决这两个问题,其基本特点是:
- 权值共享
- 局部连接
2. 卷积
卷积是一种数学运算,定义可以参考wiki。在CNN中,主要关注离散卷积。关于离散卷积的例子,可以参考 如何通俗易懂地解释卷积?- 马同学的回答。CNN中的卷积操作和数学上的定义类似,但并不完全一致(相乘的顺序不同)。
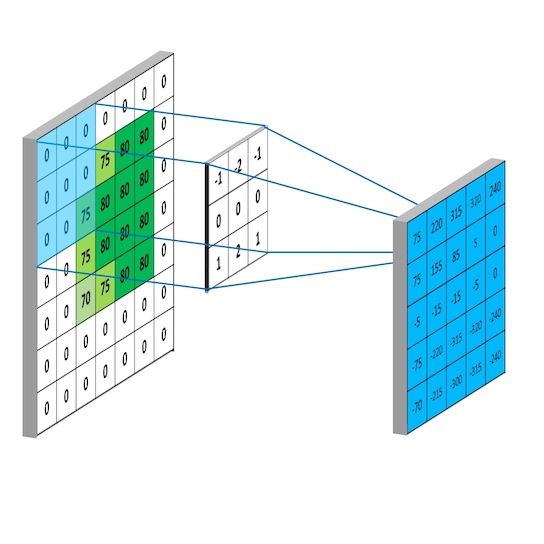
卷积核即filter,用来对图像进行特征提取。计算规则如图所示:
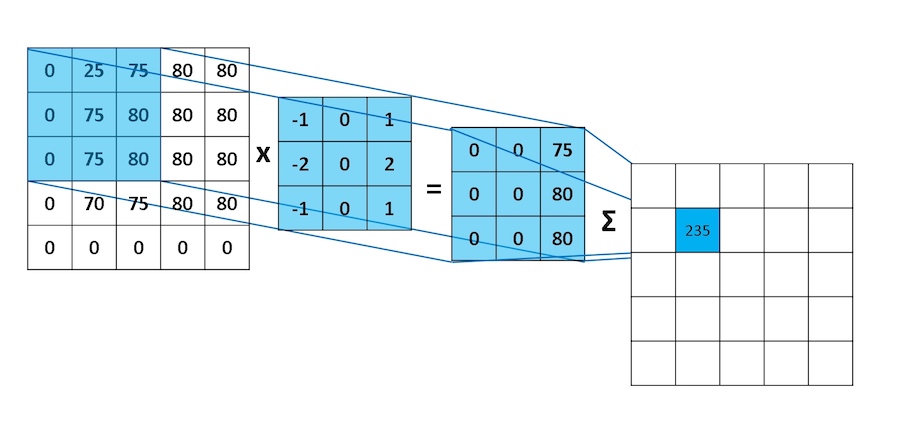
假设图片尺寸为
3. Padding
上面的操作存在的不足:
- 每次卷积操作都会使图像缩小
- 角落和边缘区域的像素点使用的很少,即丢失了图像边缘位置的信息
为了解决这两个问题,在卷积操作之前,先对图像周围进行填充,通常为zero-padding,即填充0。
常用的填充方式为:
- Valid:不填充
- Same:输出尺寸和输入尺寸一致
filter尺寸通常为奇数:方便same padding
4. Stride
filter每次移动多个像素。此时输出尺寸为:
5. Channel
对于RGB图像,有三个色彩通道,此时filter不再是二维,而是一个三维的结构。
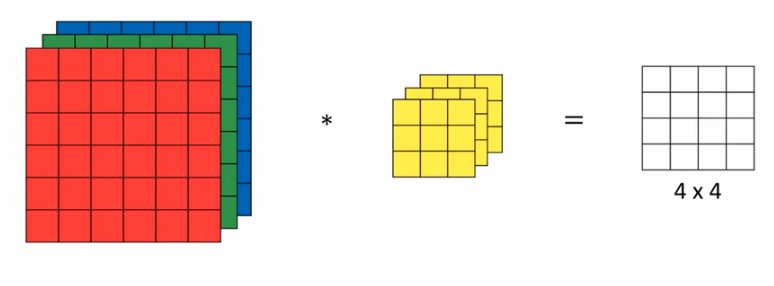
- 输入尺寸
- filter尺寸
- 输出尺寸
假设filter的个数为
6. 卷积层的符号表示
- filter size:
- padding:
- stride:
- number of filters:
- input:
- output:
,其中 , - each filter:
- activations:
, - weights:
- bias:
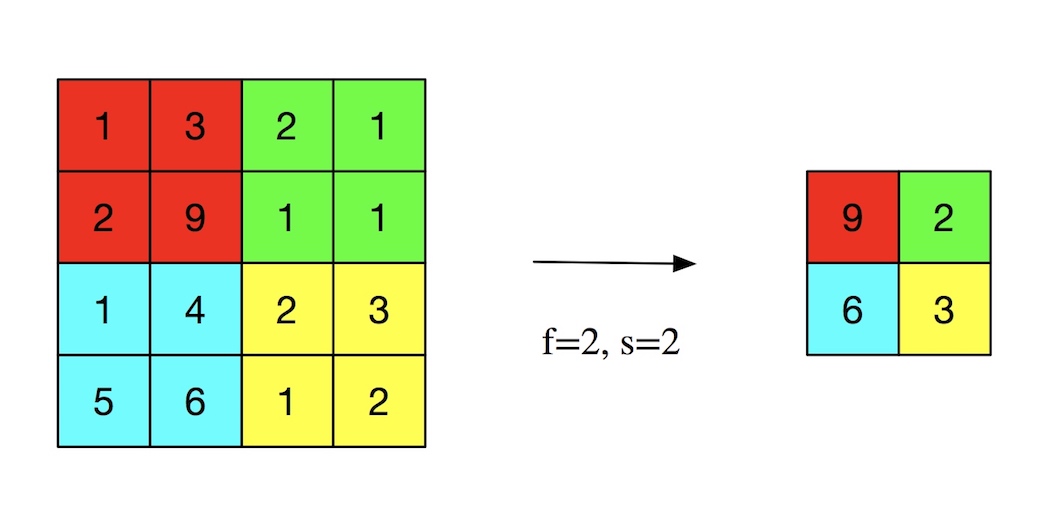
7. Pooling
- 提高计算速度
- 提高所提取的特征的有效性
参数:尺寸
pooling方法有:
- max pooling
- average pooling
常用的是max pooling:
8. CNN一般结构
- 卷积层(CONV)
- 池化层(POOL)
- 全连接层(FC)